Description
Plants are a pleasing addition to any house or patio. At the very least, they add color and interesting shapes to a bland room. Unfortunately, many plants die each year due to insufficient watering techniques. Many have seen the decay: brown, wilted leaves about to fall off their stalks. Owners either forget to take care of their precious possessions, or they just dont know what to do with them.
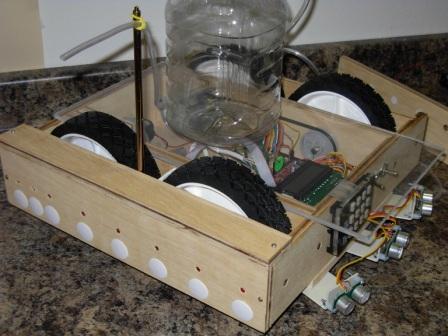
Fortunately, mindless and forgetful owners will no longer be responsible for involuntary plant starvation. WaterBot, the plant-watering robot, will take over the task of adequately watering each plant at pre-determined intervals. WaterBot will find and water the plants that are scheduled for watering. It will navigate around common obstacles found at a normal home until it reaches a thirsty plant. Once confirming the plant is on the list of to-be-watered plants, the robot dispenses a certain amount of water into the plants pot. After watering one plant, it finds other thirsty plants, remembering which ones still need watering. After watering all the plants, the robot returns to its home base and waits until it is time to water plants again.
WaterBot will follow a predetermined path that will bring it in close proximity to plants. Using its magnetic sensor array, it will detect the nearby plant, line up with the plant, water it, and continue on to the next plant. A unique number will be assigned to each plant. This number will be represented with a panel of magnets. The magnets will assist the robot in lining up with the plant and confirming each plants identity. A small database in the robots memory will contain the schedule and identity of the pots to be watered and if practical, the approximate amount to water each pot.
A small, electrical water pump (windshield wiper fluid pump) will deliver water from the on-robot reservoir to the pot. A tube will direct the water from the pump to inside the pot. Once the robot exhausts its water supply, it will return to its home base and await refilling.
Status
WaterBot is complete. WaterBot follows a straight line to each plant. It dispenses water and moves on. Once it reaches one end of the line, it turns around so it can water plants on the opposite side. Once returning to its starting point, WaterBot turns around and waits until it is time to water plants again.
Creator Info
WaterBot was created by Chad Fralick. He received his Bachelor's Degree in Electrical Engineering in May of 2006. Chad is currently a graduate student at the University of Florida studying for a Master's Degree in Electrical Engineering. He also works as an Electrical Designer at Coburn & Associates, Inc., an engineering consulting firm.