Home About Research Publications Classes Interests
 H : 'H'
was the first robot designed and built by Vijay. He
wanted to build a humanoid like 'Leutenant commander Data'. But 3
months was a short time. So H became the first step towards a complete
humanoid. When completed for the robot design course, H used wheels for
locomotion, IR sensors for human detection, bump sensors for moving
away from small objects and a single joint arm for grasping objects. H
operated in the rotunda of the engineering building following lines on
the ground. When H detected a human being on its path, H would stop and
raise its arm. If the human wanted to give it something, H would take
it with its fingers. When the human moved away, H would continue on its
path, reach a collecting bin and drop the object in it. (More details)
H : 'H'
was the first robot designed and built by Vijay. He
wanted to build a humanoid like 'Leutenant commander Data'. But 3
months was a short time. So H became the first step towards a complete
humanoid. When completed for the robot design course, H used wheels for
locomotion, IR sensors for human detection, bump sensors for moving
away from small objects and a single joint arm for grasping objects. H
operated in the rotunda of the engineering building following lines on
the ground. When H detected a human being on its path, H would stop and
raise its arm. If the human wanted to give it something, H would take
it with its fingers. When the human moved away, H would continue on its
path, reach a collecting bin and drop the object in it. (More details)
______________________________________________________________________________________________
 MEMS Integrated 3-axis
accelerometer : A sensor for monitoring the health of babies and elderly people by measuring movements
was required. A 3 axis integrated MEMS accelerometer was designed by a
team of 4 people. The design was based on a capacitance type
accelerometer using both spring and torsion effect for 3 directions.
The electronic circuit was also built on the chip. Simulations were
performed using coventorware, spice and simulink. Vijay's main role was in designing the control system for stabilizing the moving parts. __________________________________________________________________________________________________________
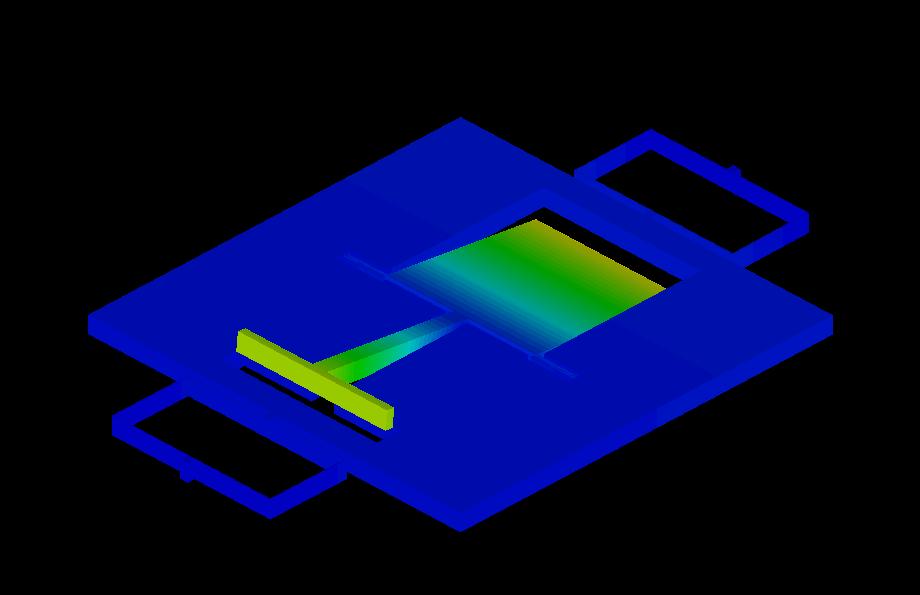
MEMS Integrated 3-axis
accelerometer : A sensor for monitoring the health of babies and elderly people by measuring movements
was required. A 3 axis integrated MEMS accelerometer was designed by a
team of 4 people. The design was based on a capacitance type
accelerometer using both spring and torsion effect for 3 directions.
The electronic circuit was also built on the chip. Simulations were
performed using coventorware, spice and simulink. Vijay's main role was in designing the control system for stabilizing the moving parts. __________________________________________________________________________________________________________

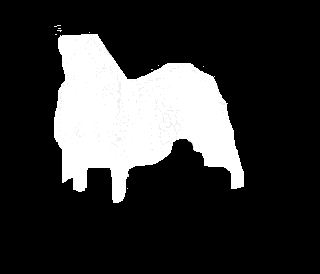 Recognition system for animal identification in wildlife photos
Recognition system for animal identification in wildlife photos
Wavelet transform was used to obtain a two level wavelet decomposition
of wildlife photos. Vector quantization was then used to obtain models
of the animal and the background. These models were used to segment
animal and background. A neural network based animal recognition
system was also used. This work is reported in NeuroSolutions. __________________________________________________________________________________________________________
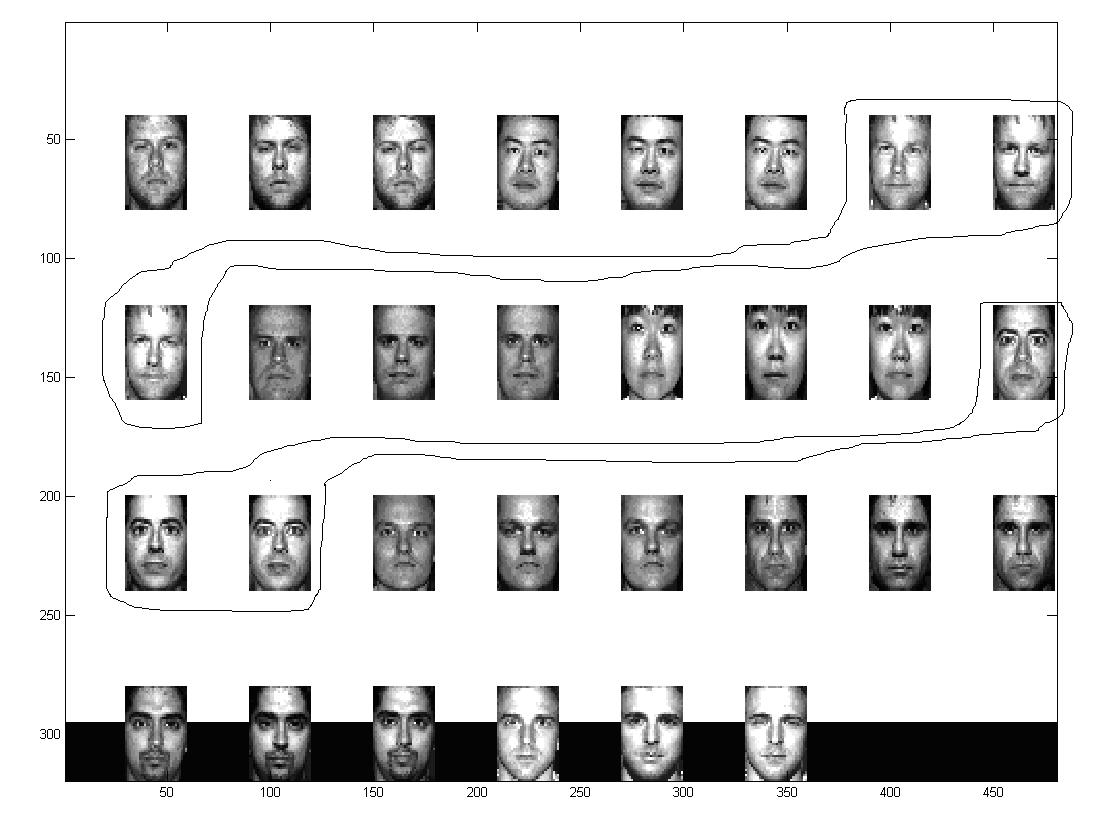 Face recognition: Face
recognition system was created
using three different methods namely neural networks, geometric pattern
matching & local linear embedding. The recognition system
identified a person's name based on frontal images of the face. Such a
system could be used in companies and airports. The yale face database
was used for the experiments. Programming was done in Matlab.
Face recognition: Face
recognition system was created
using three different methods namely neural networks, geometric pattern
matching & local linear embedding. The recognition system
identified a person's name based on frontal images of the face. Such a
system could be used in companies and airports. The yale face database
was used for the experiments. Programming was done in Matlab.
_____________________________________________________________________________________________
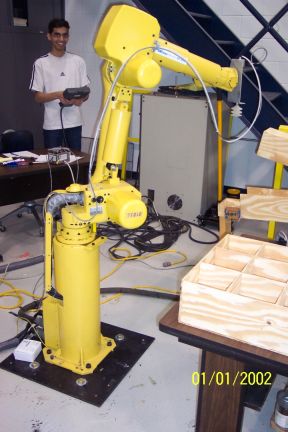 Robotic packaging system:
A Fanuc robot arm was interfaced with an Allen Bradley PLC for a
typical factory packaging system. Objects were transported through a
chute, where IR sensors connected to the PLC determined the size
of the object. This information was then communicated to the
robot arm, which picked up the object and a placed them in slots on a
packaging box. The project was done by a team of 4. Vijay's main
role was in designing the algorithm and programming the robot
arm.
Robotic packaging system:
A Fanuc robot arm was interfaced with an Allen Bradley PLC for a
typical factory packaging system. Objects were transported through a
chute, where IR sensors connected to the PLC determined the size
of the object. This information was then communicated to the
robot arm, which picked up the object and a placed them in slots on a
packaging box. The project was done by a team of 4. Vijay's main
role was in designing the algorithm and programming the robot
arm.
____________________________________________________________________________________
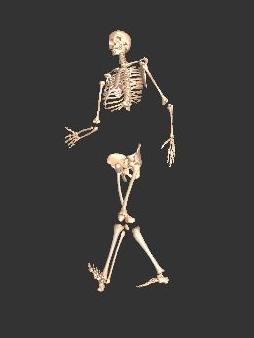 Role of Arm swing on human walking:
Many current research models in biomechanics use a point model
for the upper body analyzing the dynamics of the lower limb
movements. This project uses the full upper body and
analyzes the role of arm swing in stabilizing the body during
walking. Simulations were performed using SDfast and SIMM. (Click on pic to see video)
Role of Arm swing on human walking:
Many current research models in biomechanics use a point model
for the upper body analyzing the dynamics of the lower limb
movements. This project uses the full upper body and
analyzes the role of arm swing in stabilizing the body during
walking. Simulations were performed using SDfast and SIMM. (Click on pic to see video)
__________________________________________________________________________________________________________
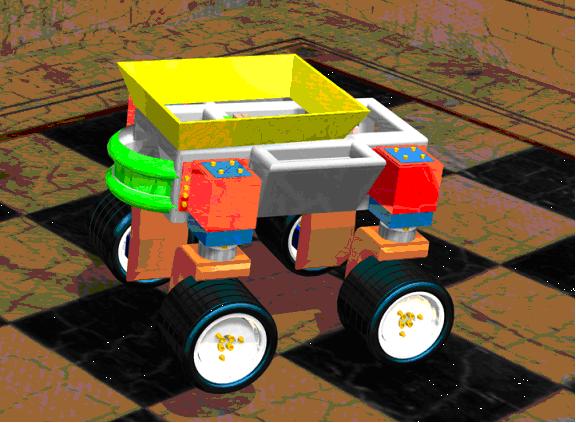 Independent steering mobile robot:
An autonomous vehicle was required for operation
in greenhouses. The
specifications required that the vehicle should
not be more than 18 inches wide and had
to carry 200 pounds of liquid pesticide
travelling on a slope of 15degrees. A zero turn
radius was also
required. A team of 4, designed the vehicle.
Vijay's main role was in estimating the dynamics
of the vehicle and therefore specifying the design of
each part.
Independent steering mobile robot:
An autonomous vehicle was required for operation
in greenhouses. The
specifications required that the vehicle should
not be more than 18 inches wide and had
to carry 200 pounds of liquid pesticide
travelling on a slope of 15degrees. A zero turn
radius was also
required. A team of 4, designed the vehicle.
Vijay's main role was in estimating the dynamics
of the vehicle and therefore specifying the design of
each part.
Home About Research Publications Classes Interests