Home About Projects Publications Classes Interests
Vijay's research focusses on robotics in general. He works in the Agricultural Robotics and Mechatronics Group (ARM), led by Dr.Burks at
the University of Florida. His dissertation is on developing
Autonomous Vehicles for operation in citrus orchards in Florida. In the
past, he has also worked on developing autonomous vehicles for
operation in greenhouses. He frequently participates with his
colleagues in their research on developing robotic arms for harvesting
citrus.
Florida Citrus

More than 90 percent of America's orange juice is made from Florida-grown oranges..(Florida Juice)
Florida is also a place where alligators use pedestrian crossing! But that is an entirely different story.

Why robots in orchards?
People
picking oranges want to be paid more for picking oranges
while standing on top of a ladder perched on a tree, carrying several
kilos of fruits on their back under the hot summer sun of the sunshine
state. Others do not even want to work in such conditions. Meanwhile, Brazilian orange growers can produce cheaper fruits than Florida growers. The economics is not encouraging in such situations. Bring the robots!
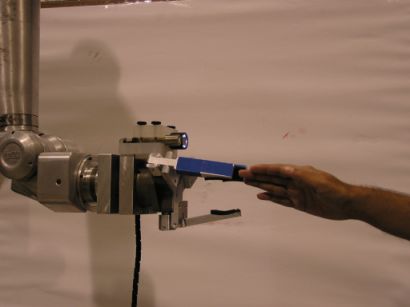
Robot Crew
Robotic Arms
Autonomous Vehicles
End Effectors
Hi-fi Sensors
Vijay's work on Autonomous Vehicles
The aim
of the research is to develop an autonomous vehicle capable of
navigating an entire citrus orchard. A typical citrus orchard covers an
area of several acres with thousand of trees planted in rows.
Applications identified for such a vehicle are mapping the orchards for
future operations, towing the robotic harvesting arms through the
orchard and scouting for locating fallen and diseased trees and taking
pictures to analyze yield.
Autonomous Tractor
 The work was started in 2003 on a commercially available tractor
donated to the lab. The tractor was retrofitted with electrohydraulic
steering circuit, camcorder camera, laser radar, speed sensor,
gyroscope and computer to make it autonomous. The guidance system uses
machine vision tree and path tracking, laser radar distance
measurement, PID steering control and sensor fusion based on fuzzy
logic enhanced kalman filter. As of 2006, the autonomous tractor is
capable of navigating orchard alleyways irrespective of the size of trees or sunlight and cloud conditions. (more details)
The work was started in 2003 on a commercially available tractor
donated to the lab. The tractor was retrofitted with electrohydraulic
steering circuit, camcorder camera, laser radar, speed sensor,
gyroscope and computer to make it autonomous. The guidance system uses
machine vision tree and path tracking, laser radar distance
measurement, PID steering control and sensor fusion based on fuzzy
logic enhanced kalman filter. As of 2006, the autonomous tractor is
capable of navigating orchard alleyways irrespective of the size of trees or sunlight and cloud conditions. (more details)
Autonomous E-gator
 The work was started in 2006 on an e-gator donated to the lab. This
vehicle is expected to take over the rest of the research from the
tractor. (more details)
The work was started in 2006 on an e-gator donated to the lab. This
vehicle is expected to take over the rest of the research from the
tractor. (more details)
Autonomous Greenhouse Vehicle
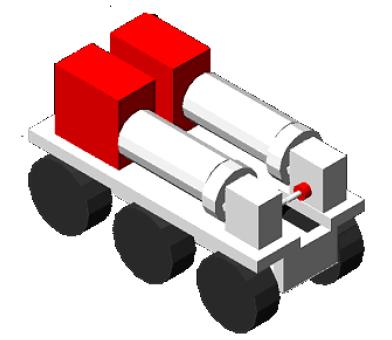 This
vehicle has been developed by three different people. Vijay developed
the machine vision and laser radar based guidance system for this
vehicle. (more details)
This
vehicle has been developed by three different people. Vijay developed
the machine vision and laser radar based guidance system for this
vehicle. (more details)
Home About Projects Publications Classes Interests