Design
StadiumBelow is a picture of the stadium that the robot will play in. It is inspired by University of Floriida's Ben Hill Griffin Stadium at Florida Field.


The features of the stadium and purposes are listed below:
- Slick surface - Allows for consistent servo movement operation every time robot is used. For example, switching from table to table will not allow for the same type of 90 degree turn required by the robot to approach the paper football.
- Stadium lighting - Allows for consistent lighting conditions for the camera to operate properly and garuntee that it will be able to see the yellow football the same each time the robot is used.
- Walls - This allows the robot to use it's ultrasonic sensors to determine its distance to the goaline once it has approached the paper football. Additionally it allows the robot to use the walls to align itself perpendicular to hit the ball in a straight line.
- Out of bounds lines - This provides a consistent goalline distance for the robot the hit the paper football to. It is also asthetically pleasing.
- Centerfield 'F' - This was intended to be a stumbling block for the design to ensure that the robot can properly distinguish the yellow football from the 'F' in the field.
- Horseshoe "U" design - This gives an open end for the human user to easily play against robot without having to reach over the stands.
- Green field - This provides a good backdrop to give a constrant between the yellow paper football and the field.
- Looks like a stadium - It was initially understood early on in the design process that a playing environment was necessarry. The look of a stadium is purely for astheic purposes.
- Jumbotron - Because I can.
Robot
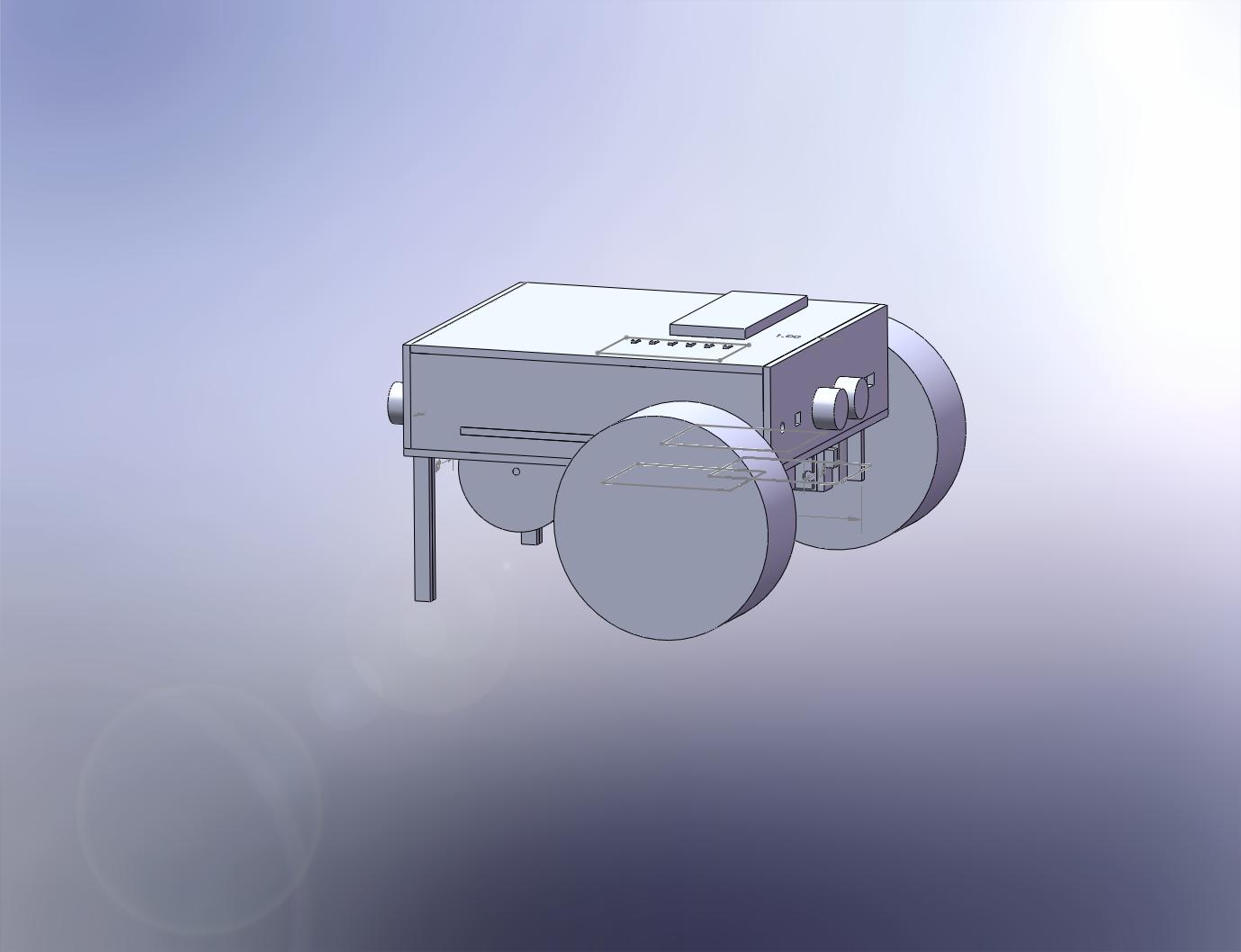
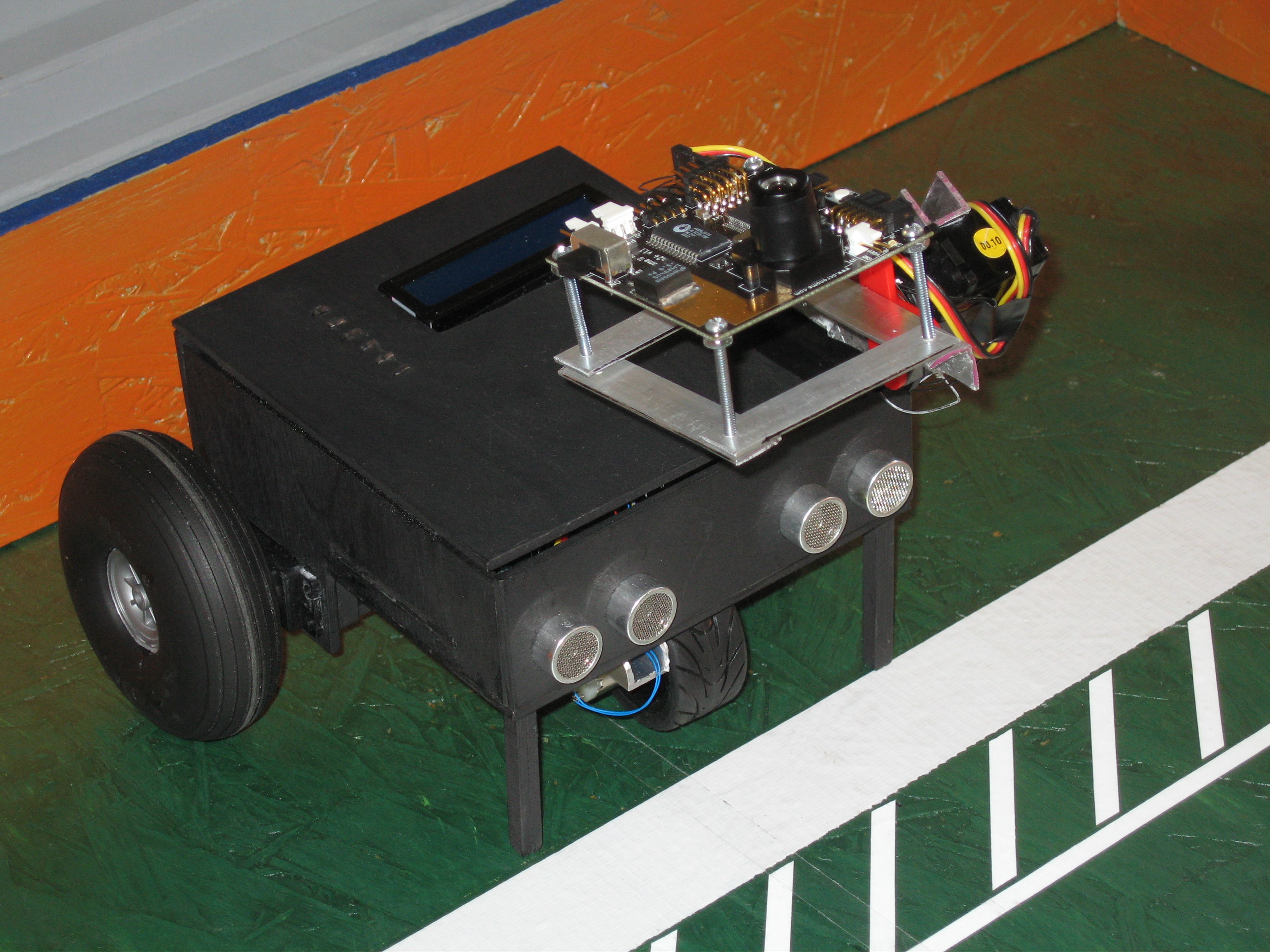
The features of the robot and their purposes are listed below:
- Ultrasonic Sesnors (2 front, 1 back) - The ultrasonic sensors have multiple purposes. The two in the front allow the robot to detect object in front of it and also determine the distance of the robot from the wall it is facing. With two sensors this allows the robot to align himself at a perpendicular angle with the wall by taking delta measurements betweenthe two sensors. The rear sensor is used when the robot is backing up so it doesn't hit anything.
- CMU Cam - The CMU Cam allows the robot to identify the yellow football and align himself with the ball to hit it. This sensor is the heart of the robot, without TeBOT could never find the football.
- LCD - The blue backlight 16x2 character LCD is used primarily for debugging and serves no actual functionality other than to let the human opponent know what the robot is thinking.
- Hitting Motor - The hitting motor the third wheel in the front of the robot. It is a DC motor driven by PWM to an H Bridge which is attached to servo to allow the hitting wheel to dock and undock to hit the paper football. When docked, the robot can drive over the paper football without hitting and when undocked is just high enough off the ground to spin freely but still catch the ball when it drives over it to hit it.
- External JTAG Port - This is for programmer ease of use instead of connecting directly to the headers on the PVR board which are inside the box. This would be cumbersome to the programmer to open the box and close it everytime a reprogramming was necessary.
- Black Box - Its a black box design!