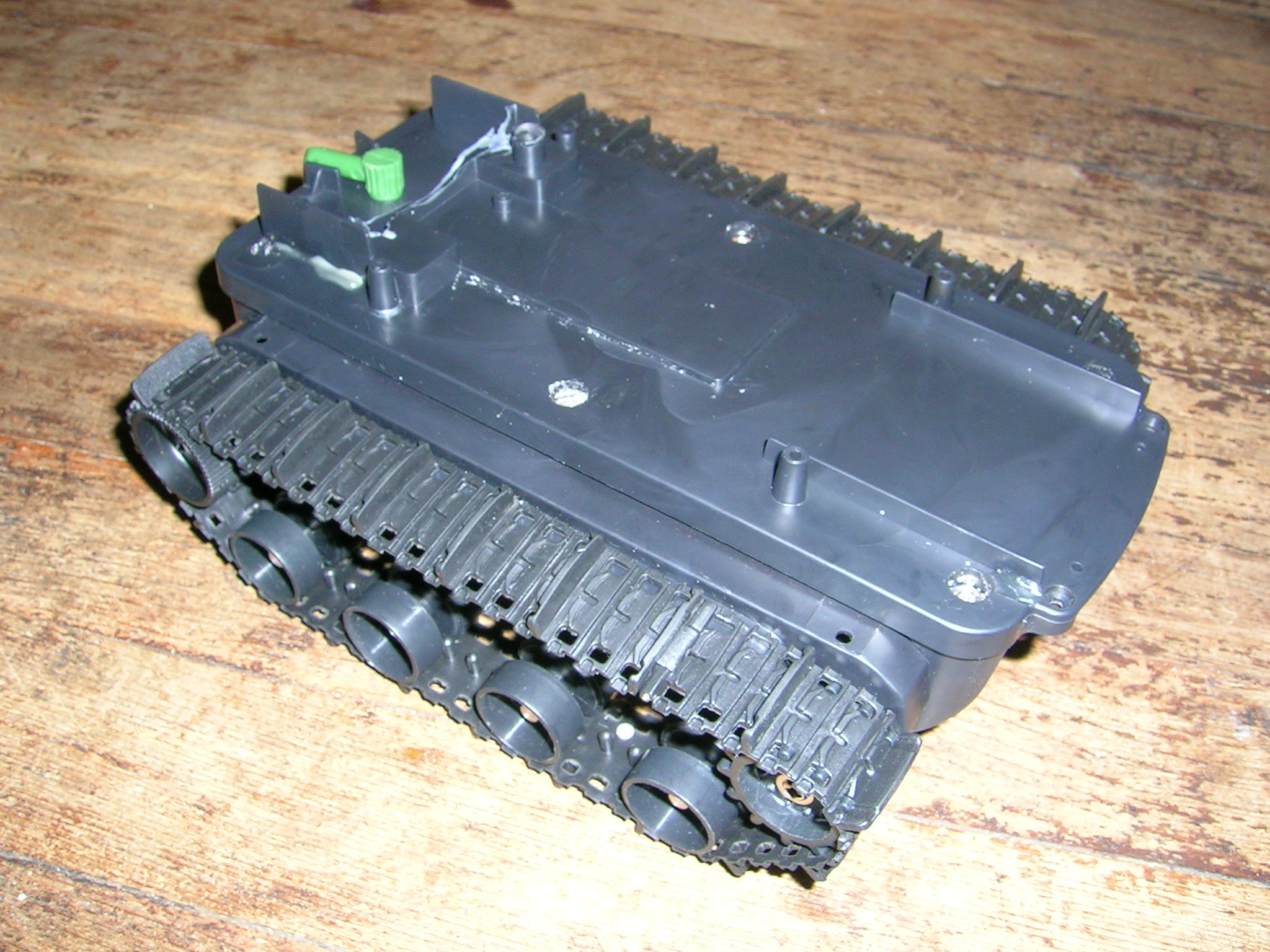
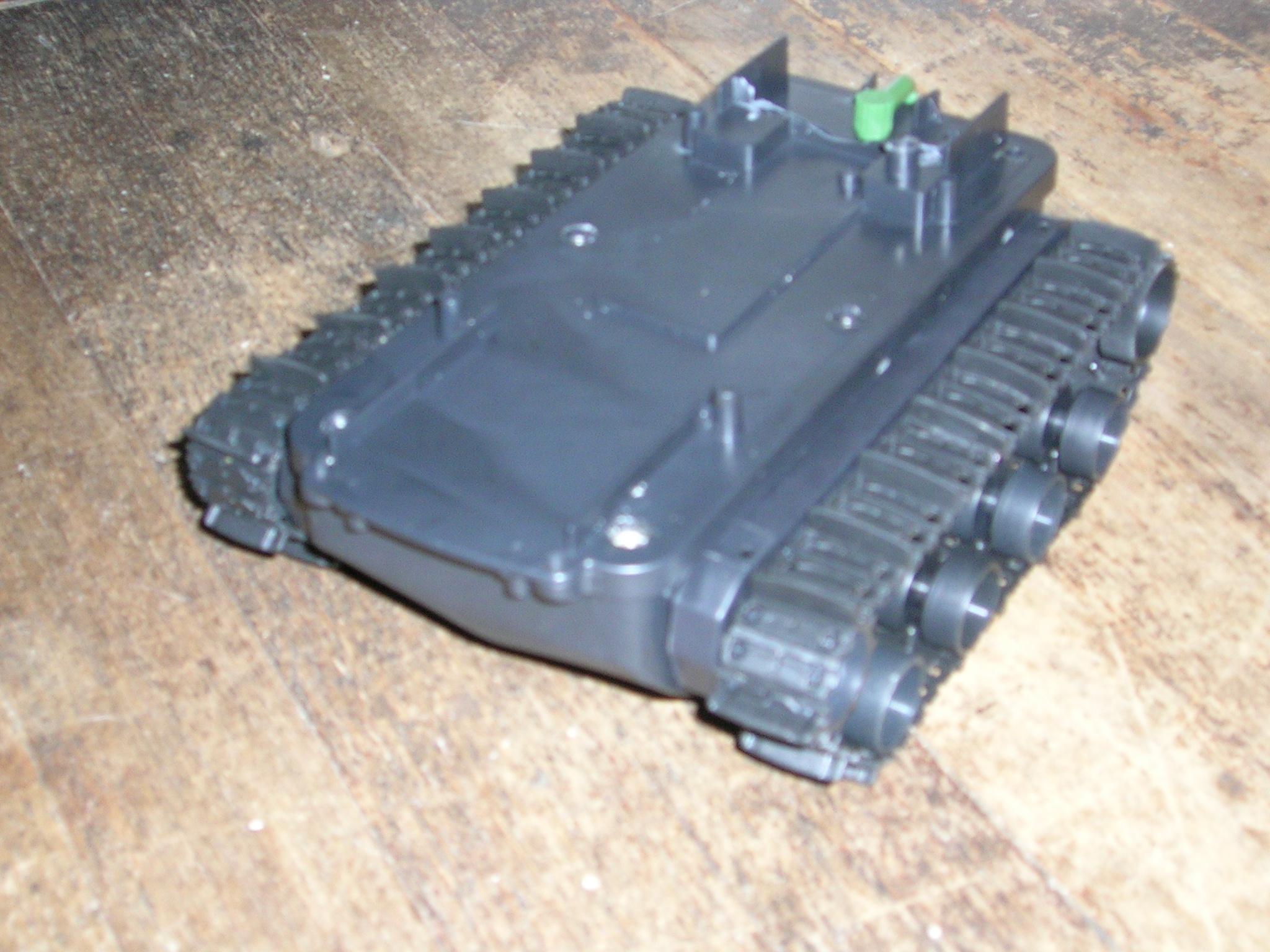
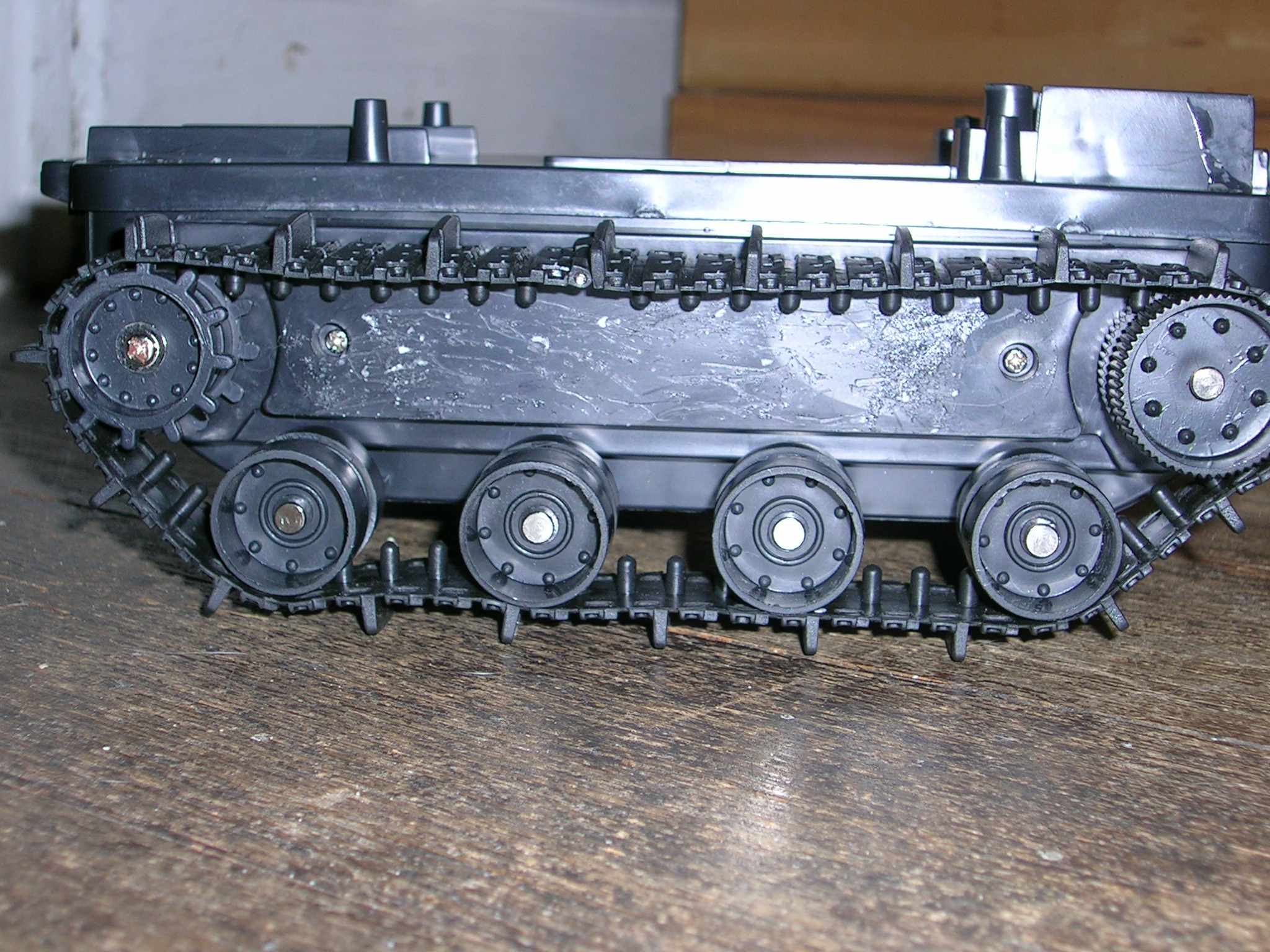
MARV's platform will be constructed out of a modified RC tank chassis. The electronics and much of the physical aspects of the tank have been removed. The inside was also drilled out to accomodate the controller board and motor drivers. In addition the tank chassis includes premounted motors that will be kept for convenience. Some pictures of MARV's chassis are located below. In addition the platform can be seen in action following a line here.
It’s imperative that the electronics stay dry so the platform must contain watertight compartments for electronic housing. It is also necessary to make sure the wire protection maintains its watertight integrity. Tubing may be used to provide watertight paths to servos and other electronic mechanisms. Example of watertight camera housing is posted below.

Another necessary objective for MARV is neutral buoyancy. For purposes of navigation and ease of moving in and out of the water it has been decided to make MARV slightly negative of neutral. This means that with all motors off he will be weighted slightly to fall to the bottom. This is okay behavior for MARV since his cargo will be located at the bottom so it’s not much of a problem is he glides along the bottom of the lake rather than mid-depth. In addition when exiting the water, the extra pressure between the track and the ramp could make it easier to move the platform out of the water.