
|

|

|

|

|
|
SwampSat is a pico-satellite set for launch in low-earth orbit (LEO) in 2009. SwampSat's mission
is to accomplish attitude determination and attitude control using control moment gyroscopes; the 1st
of its kind at the pico-satellite level. I am the lead on the communications subsytem and am on the command
and data handling (CDH) team. My work includes the integration of sensors, custom & OTS modules, and actuators
to the TI MSP430 microcontroller. Programmed in C, the CDH includes SPI, I2C, and SCI serial communications,
multiple channel analog-to-digital conversions, and power management.
Tony is an autonomous robot who can find littered aluminum cans, glass bottles, and plastic bottles; collect them; and sort them. Centered around the ATMega128 microcontroller, supplemented by the TI MSP430 and programmed in C, Tony integrates 3 SONAR modules, 4 Sharp IR detectors, 4 servo motors, 2 DC motors, an LCD screen, bump sensors, and a currently TOP SECRET special sensor used to distinguish cans from bottles.
Goofy Gator
From the winter of 2007 to around May of 2008, I designed a game, commonly known as the Wacky Wire or Wacky Wizard that can be seen at carnivals and fairs. I used a Microchip PIC controller to control a stepper motor which rotates a stiff, coiled wire. The player can control the speed (relative to difficulty) and the direction of rotation of the wire. The object of the game is to navigate a ring around the rotating coil, without making contact with the coil, to a goal. If the player successfully traverses the coil, the motor halts and green lights flash. If the player makes contact with the coil at any point, the motor halts, red lights flash, and a piezoelectric device buzzes. I wrote all of the code in BASIC. It was a fun pet project that I had undertaken for a friend who wanted to master this common carnival game.
Automatic Pet Feeder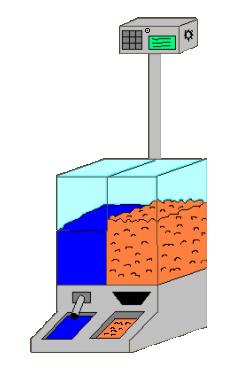
The automatic pet feeder is a user-programmable, fully automated, pet feeder for dispensing both water and dry food. It has the capacity to feed a medium sized pet for up to nine days. The automatic pet feeder is primarily designed for business and casual travelers who frequently leave home for trips lasting up to a week. The feeder could eliminate the hassle and cost of boarding a pet. Programmed in C and centered around the TI MSP430 microcontroller, the feeder includes two different fill sensors for the food and water bowl to prevent overflow. LED lighting that automatically turns on in the dark. Easily programmable feeding settings via the keypad and LCD. At feeding time, a programmable, personal message recorded by the user sounds to alert the pet. The water dispenser is controlled by an electronic valve. The food dispenser is controller by a stepper motor. | ||||
|

