The ECE Department at University of Florida offers one course where the students are trained in the areas of design and construction of autonomous robots and machine learning. It is EEL 5666 run by Intelligent Machines Design Laboratory (IMDL).
I took this class in 2009 Fall semester.
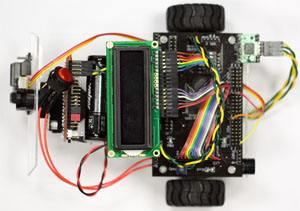
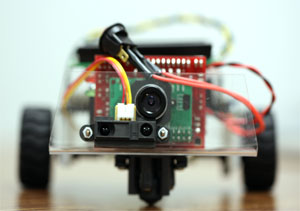
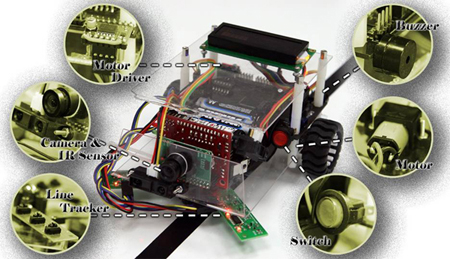
Robot Name: Follower;
Designer: Jun Ling;
Robot Behavior: In open space, Follower follows a moving target. Follower can also track an object in a two-lane situation; when a hostile vehicle moves toward Follower, it will dodge to avoid collision, changing lanes if necessary.