University of Florida
Department of Electrical and Computer Engineering
EEL5666C
Intelligent Machines Design Laboratory
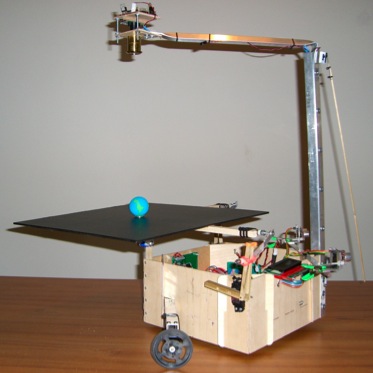
Atlas will roam around a room, avoiding obstacles, while balancing a ball. This is done by monitoring the ball with a camera and tilting the platform when the ball is not centered. Obstacle avoidance is performed by two sonar range finders and a bump switch.
You can read more about Atlas and this project by following the links on the top of this page.

Weekly Updates (PDF’s)
Reports (PDF’s)
Presentations (HTML)
Old Videos (Google Video)
Best Video (You have to see this)
Video 5 (.mp4)