Project Description:
| Welcome to
Stefan Craciun's Website |
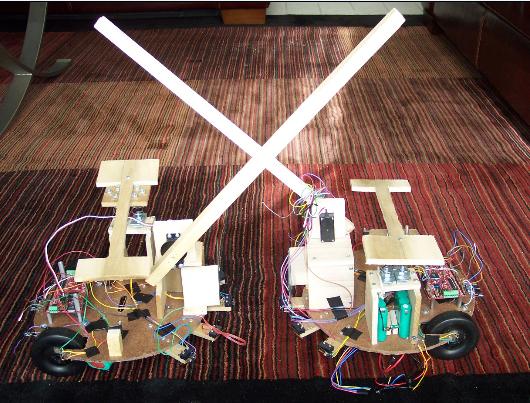
| Tag Team Ting-Yang |
| Ying and Yang are two autonomous robots which play a game of tag with each other. The robots avoid obstacles while chasing each other and eventually tagging the opponent by whacking it with a wooden stick. The purpose of the project was to design two systems capable of finding the position of a moving object, tracking it down and recognizing it once it is in its proximity. The robots will both take turns at running away and pursuing each other while imitating the universal game of tag. The overall project was intended for entertainment purposes but the solutions and the algorithms developed can be used for any project that requires similar tasks. |
| The scope of this project is to design a mechanical game which can track a very fast moving object, calculate its future position and hit the object back. The Pong robot should also move very fast and stop precisely at a desired location. Our group has design the image processing with the use of external hardware components such as an AtoD and a DtoA converter an FPGA and a Microprocessor(not usinga computer or any preprocessed information). The algorithm that we have developed was written in VHDL and downloaded to the FPGA and in C and has been downloaded to the microprocessor. The entire design has been integrate into one product using the Protel software. |
| Inverted Pendullum Robot Project |
Project Description:
| The purpose of this project is to design a robot which will maintain a metal rod in a vertical position by ballancing it accordingly. The robot will use an observer state feedback controller to continually measure the angle that the rod deviates from a perfect vertical position and also the distance that the rod has had to travel left and right to maintain its vertical equilibrium. |
