Student, University of Florida
craciuns@ufl.edu
Summer semester 2006
EEL 5666: Intelligent Machines Design Laboratory (IMDL)
Tag Team Ying
Yang
 |
 |
 |
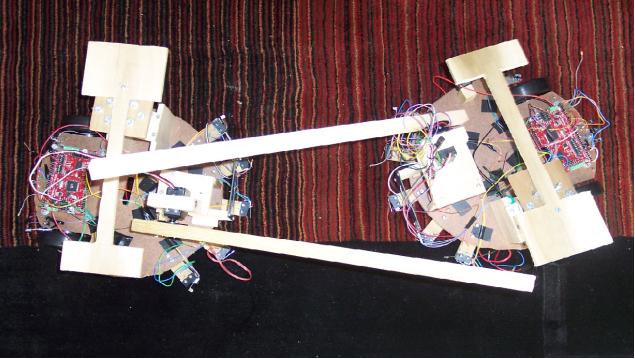 |
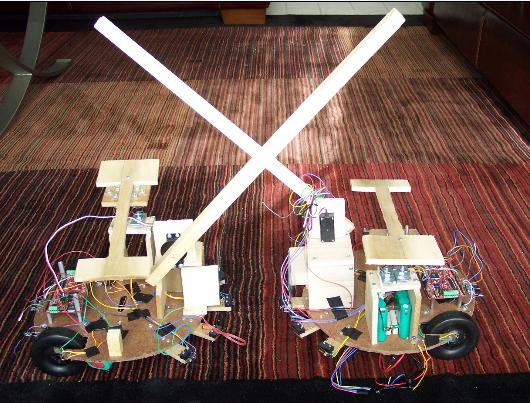
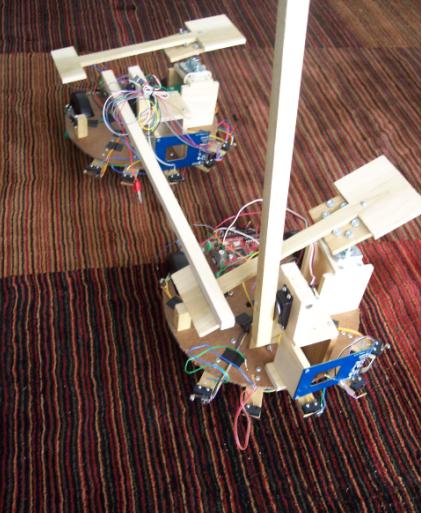
Purpose of Project: The goal of my project is to design two robots which will play a game of tag. The robots will avoid obstacles and will recognize each other with the use of IR detectors and emitters functioning at a particular frequency as well as RFID readers and tags. One robot will start off by cchasing and the other by running. The chasing robot will move faster. When the chasing robot is whithin reach of his oppenent it will wack it with a wooden stick back up and run away. The other robot is "IT".
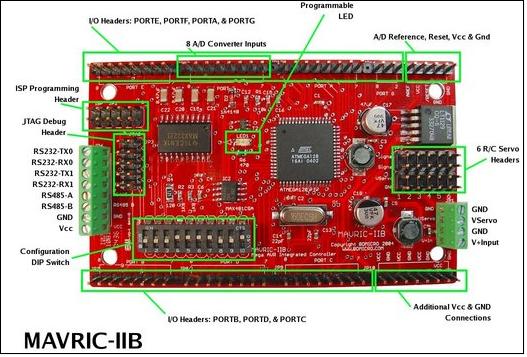
Components used:
Mavric II B board (bought from bdmicro.com)
 |
 |
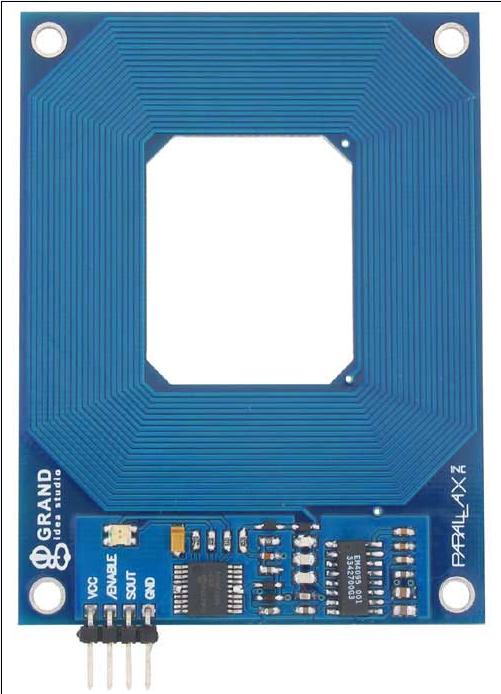
RFID reader Futaba servo IR Detector(37kHz) LEDs(37kHz) Bump Switch
 |
 |
 |
 |
 |
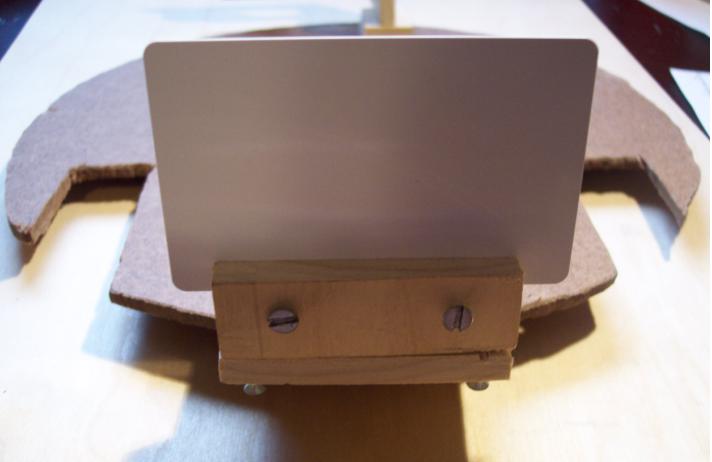
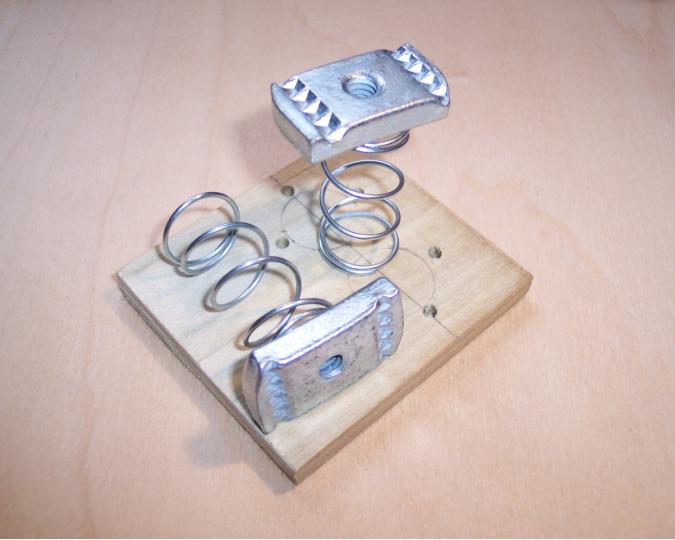
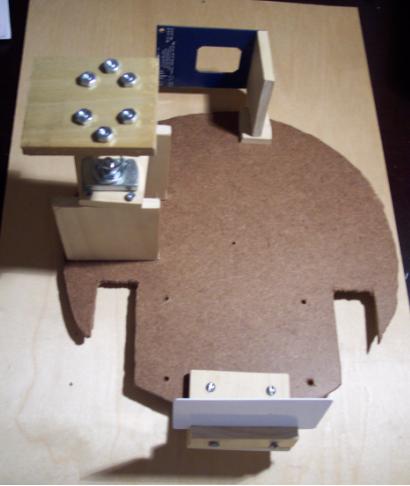
Description of project:
Pictures of developing project:
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Sample CodeVision programs:
1) Write to LCD
This is a simple program written in CodeVision which displays a string of characters to the LCD.
(*The LCD is connected to PORT D of the Mavric II B board)
CodeVision LCD program
2) RFID reader
This CodeVision program will read the string of characters sent by the RFID tag with the RFID reader and will display all the characters to the LCD screen
The data is transmitted serially to the microprocessor through PIN 0 of port E of the Mavric II B board.
CodeVision RFID program
3) Servo program
This CodeVision program will generate two different square waves using Timer zero on the Mavric II B board by changing the value stored in the Output Compare Register. The servo will oscilate between two angles and will hold its position for approximately 1.6 seconds.
CodeVision Servo Program